6. MathWorks Linear MPC Plugin¶
As a result of a long-term collaboration, MathWorks Inc. and Embotech AG developed a MATLAB® plugin for FORCESPRO. Users are now able to use the FORCESPRO solver in MATLAB® and Simulink® from within the MATLAB® Model Predictive Control Toolbox. The plugin leverages the powerful design capabilities of the Model Predictive Control Toolbox™ and the computational performance of FORCESPRO. With FORCESPRO 2.0, toolbox users can now easily define challenging control problems and solve long-horizon MPC problems more efficiently.
Model Predictive Control Toolbox™ provides functions, an app, and Simulink® blocks for designing and simulating model predictive controllers. The toolbox enables users to readily specify plant and disturbance models, horizons, constraints, and weights. User-friendly control design capabilities of Model Predictive Control Toolbox™, combined with the powerful numerical algorithms of FORCESPRO, enables code deployment of the FORCESPRO solver on real-time hardware from within MATLAB® and Simulink®, in addition to the QP solvers shipped by MathWorks. The new FORCESPRO interface comes with various features such as Simulink blocks that can generate code runnable on embedded targets such as dSpace. The parameters of the MPC algorithm, such as plant and disturbance model, prediction horizon, constraints and move-blocking strategy can be specified directly. The toolbox enables users to run closed-loop simulations and evaluation of controller performance. User-friendly MPC design capabilities are combined with the powerful numerical algorithms of FORCESPRO. This combination of the Model Predictive Control Toolbox™ and FORCESPRO enables code deployment on real-time hardware. The generated code is highly optimized for fast computations and low memory footprint.
This interface is provided with all variants of FORCESPRO, starting with Variant S. It is compatible with MATLAB R2019b, 2020a and 2020b.
The plugin mainly consists of the three following MATLAB commands which are described in details in this chapter:
mpcToForcesfor generating a FORCESPRO solver from an MPC object designed by the Model Predictive Control Toolbox
mpcmoveForcesfor calling the generated solver on a specific MPC problem instance
mpcCustomSolverfor using the FORCESPRO dense QP solver as a custom solver
An auxiliary file is also exposed to the users for generating different solvers options, namely mpcToForcesOptions.
The following LTI MPC features are supported:
Continuous and discrete time plant models
Move blocking
Measured disturbances
Unmeasured disturbances
Disturbance and noise models
Uniform or time-varying weights on outputs, manipulated variables, manipulated variables rates and a global slack variable
Uniform or time-varying bounds on outputs, manipulated variables and manipulated variables rates
Soft constraints
Signal previewing on reference and measured disturbances
Scale factors
Nominal values
Online updates of weights and constraints
Built-in and custom state estimators
Currently, convex quadratic programs are supported by the MATLAB plugin. Extensions to adaptive and linear time-varying are under development. The current limitations of the plugin are the following:
Mixed input-output constraints are not covered
Offdiagonal terms on the hessian of the objective cannot be implemented
Unconstrained problems are not supported
No single-precision solvers, only double precision currently
No suboptimal solutions
6.1. Different types of solvers¶
The plugin converts an MPC object (weights, bounds, horizons, prediction model) into a quadratic program (QP) formulated via the FORCESPRO API. One key design decision is to choose the decision variables in the quadratic program. There are two classic choices and they lead to two different formulations:
Dense QP, where only the manipulated variables \(MV\) or \(\Delta{}MV\) are decision variables. In this case, the hessian and linear constraints matrices are stored as dense matrices.
Sparse QP, where \(MV\), \(\Delta{}MV\), the outputs \(OV\) and the states \(X\) are decision variables. In this case, all matrices have a block sparse structure as in Low-level interface.
Typically, a dense QP has fewer optimization variables, zero equality constraints and many inequality constraints. Although the sparse QP is generally much larger than the dense QP its structure can be efficiently exploited to reduce the solve times. Besides, the dense formulation has an inherent flaw, which is that the condition number increases with the horizon length, especially when the plant states have large contributions to the plant inputs and outputs. Thus, the best solution is to allow users to switch to the sparse formulation, which prevents numerical blow-ups when the plant is unstable. Nevertheless, the dense formulation can be beneficial in terms of solve time when there is an important amount of move-blocking.
6.2. Generating a QP solver from an MPC object¶
Given an MPC object created by the mpc command, users can generate a QP solver tailored to their specific problem via the following command:
% mpcobj is the output of mpc(...) % options is the output of mpcToForcesOptions(...) [coredata, statedata, onlinedata] = mpcToForces(mpcobj, options);
Two types of QP solvers can be generated via mpcToForces: a sparse solver that corresponds to a multi-stage formulation as in Low-level interface and a dense solver that corresponds to a one-stage QP with inequality constraints only.
The API of mpcToForces is described in more details in the tables below. The mpcToForces command expects an MPC object mpcobj and a structure options generated by mpcToForcesOptions as inputs.
Input |
Description |
|---|---|
mpcobj |
LTI MPC controller designed by Model Predictive Control Toolbox |
options |
Object that provides solver generation options. |
The outputs of mpcToForces consist of three structures coredata, statedata and onlinedata. The FORCESPRO server generates two types of solvers:
customForcesSparseQP when the option ‘sparse’ is set. An m file named `customForcesSparseQP.m` with the corresponding mex interface as well as the solver libraries and header in the `customForcesSparseQP` folder. In this particular case (sparse), the name of the solver can be set by users.
customForcesDenseQP when the option ‘dense’ is set. An m file named `customForcesDenseQP.m` with the corresponding mex interface as well as the solver libraries and header in the `customForcesDenseQP` folder. In this particular case (dense), the solver name cannot be changed by users.
Output |
Type |
Description |
|---|---|---|
coredata |
Structure |
Stores constant Store constant data needed to construct quadratic progam at run-time |
statedata |
Structure |
Represents prediction model states and last optimal MV. The index \(k\) stands for the current simulation time. It contains 4 fields: When built-in state estimation is used:
In this case, users should not manually change any field at run-time. When custom state estimation is used:
In this case, user should manually update Plant, Disturbance (if used), Noise (if used) fields at run-time but leave LastMove alone. |
onlinedata |
Structure |
Represent online signals It contains up to three fields:
ref (references of Output Variables) mvTarget (references of Manipulated Variables) md (when Measured Disturbance is present) ym (when using the built-in estimator) externalMV (when UseExternalMV is true in the options object)
y (when UseOnlineWeightOV is enabled) u (when UseOnlineWeightMV is enabled) du (when UseOnlineWeightMVRate is enabled) ecr (when UseOnlineWeightECR is enabled)
vmin (when UseOnlineConstraintOVMin is enabled) vmax (when UseOnlineConstraintOVMax is enabled) umin (when UseOnlineConstraintMVMin) umax (when UseOnlineConstraintMVMax) dumin (when UseOnlineConstraintMVRateMin) dumax (when UseOnlineConstraintMVRateMax) |
In order to provide the code-generation options to mpcToForces, the user needs to run the command mpcToForcesOptions with one of the following two arguments as input:
“dense” for generating the options of a one-stage dense QP solvers
“sparse” for generating the options a multi-stage QP solver.
The structures provided by the mpcToForcesOptions command have the following MPC related fields in common between the “dense” and “sparse” case:
SkipSolverGeneration. When set to True, only structures are returned. If set to False, a solver mex interface is generated and the structures are returned. Default value is False.
UseOnlineWeightOV. When set to True, it allows Output Variables weights to vary at run time. Default is False.
UseOnlineWeightMV. When set to True, it allows Manipulated Variables weights to vary at run time. Default is False.
UseOnlineWeightMVRate. When set to True, it allows weights on the Manipulated Variables rates to vary at run time. Default is False.
UseOnlineWeightECR. When set to True, it allows weights on the ECR to change at run time. Default is False.
UseOnlineConstraintOVMax. When set to True, it allows updating the upper bounds on Output Variables at run time. Default is False.
UseOnlineConstraintOVMin. When set to True, it allows updating the lower bounds on Output Variables at run time. Default is False.
UseOnlineConstraintMVMax. When set to True, it allows updating the upper bounds on Manipulated Variables at run time. Default is False.
UseOnlineConstraintMVMin. When set to True, it allows updating the lower bounds on Manipulated Variables at run time. Default is False.
UseExternalMV. When set to True, the actual Manipulated Variable applied to the plant at time \(k-1\) is provided as output. Default is False.
UseMVTarget. When set to True, an MV reference signal is provided via the
onlinedatastructure. In this case, MV weights should be positive for proper tracking. When false, the MV reference is the nominal value by default and MV weights should be zero to avoid unexpected behaviour. Default is False.
Both the “dense” and “sparse” options structures have the following solver related fields in common:
ForcesServer is the FORCESPRO server url. Default is forces.embotech.com.
ForcesMaxIteration is the maximum number of iterations in a FORCESPRO solver. Default value is \(50\).
ForcesPrintLevel is the logging level of the FORCESPRO solver. If equal to \(0\), there is no output. If equal to \(1\), a summary line is printed after each solve. If equal to \(2\), a summary line is printed at every iteration. Default value is 0.
ForcesInitMethod is the initialization strategy used for the FORCESPRO interior point algorithm. If equal to \(0\), the solver is cold-started. If equal to \(1\), a centered start is computed. Default value is \(1\).
ForcesMu0 is the initial barrier parameter. It must be finite and positive. Its default value is equal to \(10\). A small value close to \(0.1\) generally leads to faster convergence but may be less reliable.
ForcesTolerance is the tolerance on the infinity norm of the residuals of the inequality constraints. It must be positive and finite. Its default value is \(10^{-6}\).
ForcesTargetPlatform for choosing a target platform to deploy the solver. Currently, dSpace, Speedgoat and BeagleBone-Blue are supported.
In the “sparse” solver case, there are four more fields:
SolverName for customuzing the solver name.
UseOnlineConstraintMVRateMax for setting MVRate upper bounds.
UseOnlineConstraintMVRateMin for setting MVRate lower bounds.
UseOneSlackVariablePerStep to enable one slack variable per prediction step.
6.3. Solving a QP from MPC online data¶
Once a QP solver has been generated it can be used to solve online MPC problems via the MATLAB command mpcmoveForces as follows
% the coredata, statedata and onlinedata structures are outputs of mpcToForces [mv,statedata,info] = mpcmoveForces(coredata,statedata,onlinedata);
The outputs of the mpcmoveForces command are described below. In the table below \(n_m\) denotes the number of manipulated variables, \(n_x\) stands for the state dimension of the system implemented in the MPC object, \(p\) is the prediction horizon and \(k\) is the current solve time instant.
Output |
Type |
Description |
|---|---|---|
mv |
Vector of size nm |
Optimal manipulated variables at current solve time instant |
statedata |
Structure |
Initialized by |
info |
Structure |
Information about the FORCESPRO solve
|
6.4. Using the FORCESPRO MPC Simulink block¶
Both the FORCESPRO sparse and dense solvers can be used inside Simulink. The dense QP formulation is usable from the shipped Simulink MPC controller block directly. For this, the following steps are needed:
Generate a custom dense FORCESPRO solver
options = mpcToForcesOptions('dense'); mpcToForces(mpcobj, options);
Set the following settings in the MPC object
mpcobj.Optimizer.CustomSolver = true; mpcobj.Optimizer.CustomSolverCodeGen = true;
The FORCESPRO sparse QP solver is also available via the Model Predictive Control Toolbox in Simulink. A dedicated block has been implemented for this purpose. All features of the MATLAB plugin are available through this Simulink block, namely measured disturbances, external manipulated variables, references for manipulated variables, custom state estimation as well as online weights and constraints. Configuring the block is done via the user interface shown in Figure 6.1 below. Currently only the sparse QP solver can be used via the Simulink API.
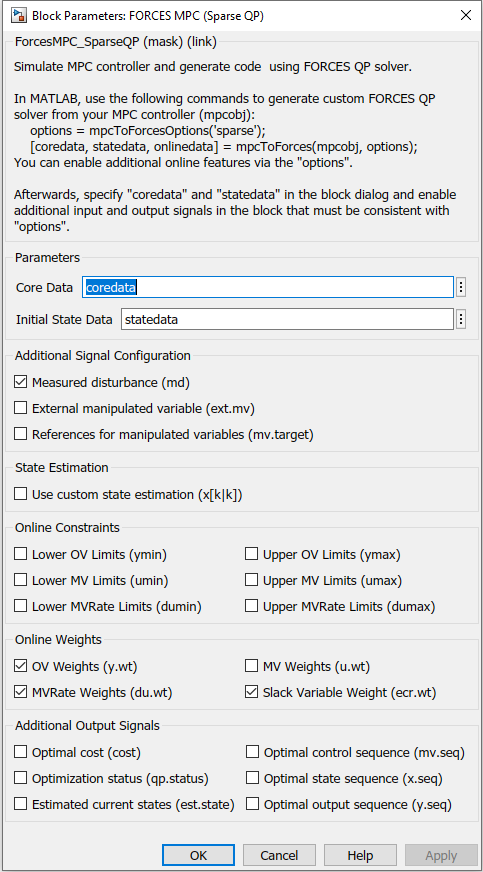
Figure 6.1 FORCESPRO MPC block configuration window¶
In order to run a simulation using the FORCESPRO Simulink block, a solver first needs to be generated via the following code for instance:
%% Generate FORCESPRO sparse QP solver options = mpcToForcesOptions('sparse'); % For this example we need to specify that online weights on the outputs, % the input rates and the ECR slacks are used options.UseOnlineWeightOV = true; options.UseOnlineWeightMVRate = true; options.UseOnlineWeightECR = true; [coredata, statedata, onlinedata] = mpcToForces(mpcobj, options);
The structures coredata and statedata needed by the FORCESPRO solver are then provided to the Simulink block via the window shown in Figure 6.1.
coredata is the variable name of the core data structure generated by mpcToForces in the base workspace.
initial state data is the variable name of the state data structure generated by mpcToForces in the base workspace. The user is expected to populate this structure with initial states of the plant and disturbances.
md checkbox should be selected if MD channels exist in the MPC object.
x[k|k] checkbox needs to be selected for using a custom state estimator.
Optional outputs provide more information. It is recommended to monitor the qp.status port to check whether the MPC block produces a feasible solution.
The integration of the FORCESPRO MPC block in a Simulink model is shown in Figure 6.2 below.
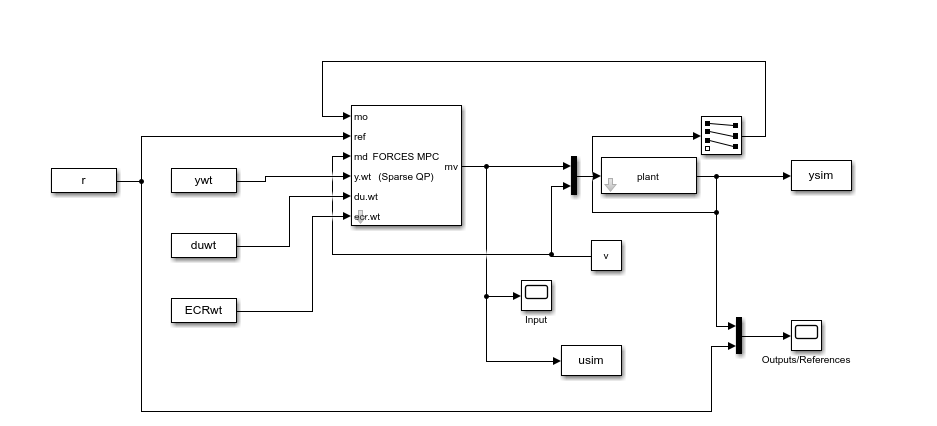
Figure 6.2 Simulink model illustrating the integration of the FORCESPRO MPC block¶
The Simulink model can be run either by clicking on the Run button in Simulink or from MATLAB using the sim command.
% Start simulation. mdl = 'forcesmpc_onlinetuning'; open_system(mdl); % Open Simulink(R) Model sim(mdl); % Start Simulation
Finally, the FORCESPRO MPC block is available via the Library browser once the user has updated his client to the latest version of FORCES, as shown in Figure 6.3 below.
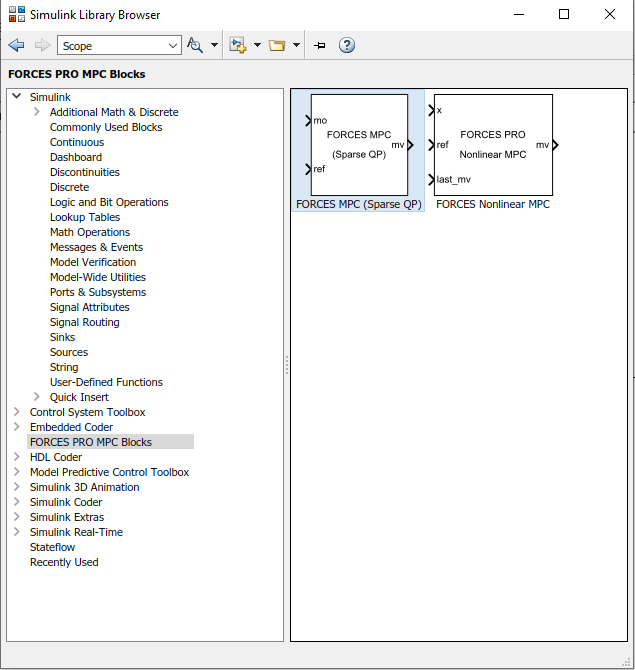
Figure 6.3 FORCESPRO MPC block in the library browser¶
6.5. Deploy to dSpace MicroAutoBox II using the FORCESPRO MPC Simulink block¶
The FORCESPRO sparse solvers can be used inside Simulink to deploy to dSpace MicroAutoBox II. All features of the MATLAB plugin are available through this Simulink block, namely measured disturbances, external manipulated variables, references for manipulated variables, custom state estimation as well as online weights and constraints. Configuring the block is done via the user interface shown in Figure 6.4 below.
Figure 6.4 FORCESPRO MPC block configuration¶
In order to run an MPC simulation in dSPACE using the FORCESPRO block, a solver first needs to be generated via the following code:
%% Generate FORCESPRO sparse QP solver options = mpcToForcesOptions('sparse'); % For this example we need to specify that online weights on the outputs, % the input rates and the ECR slacks are used options.UseOnlineWeightOV = true; options.UseOnlineWeightMVRate = true; options.UseOnlineWeightECR = true; options.ForcesTargetPlatform = 'dSPACE-MABII'; [coredata, statedata, onlinedata] = mpcToForces(mpcobj, options);
Note that the option ForcesTargetPlatform needs to be specified. The structures coredata and statedata needed by the FORCESPRO solver are then provided to the Simulink block via the window shown in Figure 6.4. The integration of the FORCESPRO MPC block in a Simulink model is shown in Figure 6.5 below.
Figure 6.5 FORCESPRO MPC block integration in a Simulink model¶
When creating the Simulink Model, in the Configurations, in the “Code Generation” tab, set the options (see Figure 6.6 below):
System target file:
rti1401.tlcLanguage: C
Generate makefile: On
Template makefile:
rti1401.tmfMake command:
make_rti
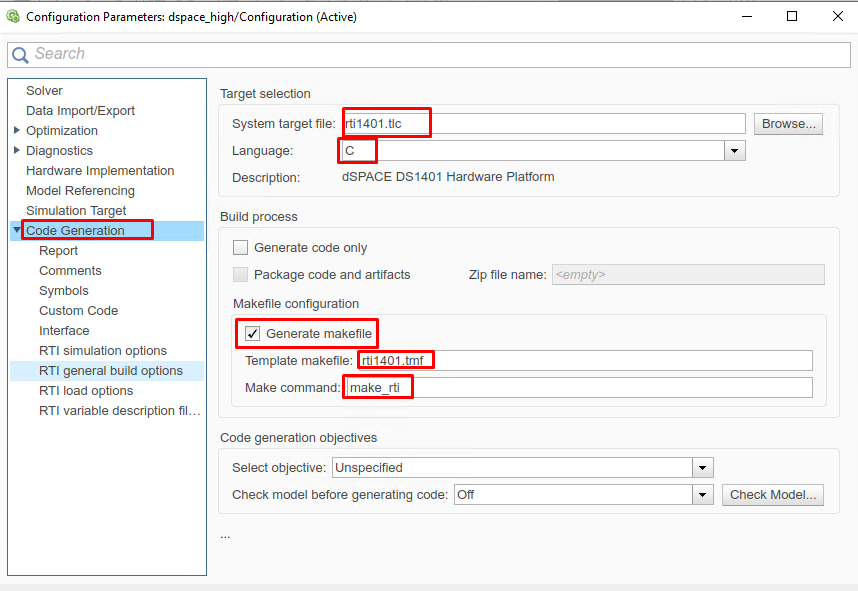
Figure 6.6 Configure Code Generation for dSPACE MicroAutoBox II¶
The Simulink model can be used for Code Generation from MATLAB in the usual way.
% Start Code Generation. mdl = 'forcesmpc_onlinetuning_dSpace_MicroAutoBoxII'; open_system(mdl); % Open Simulink(R) Model load_system(mdl); % Load Simulink(R) Model rtwbuild(mdl); % Start Code Generation
After code generation the dspace compiler (Microtec PowerPC) generated files to use to run your model on the MicroAutoBox II (see Figure 6.7).
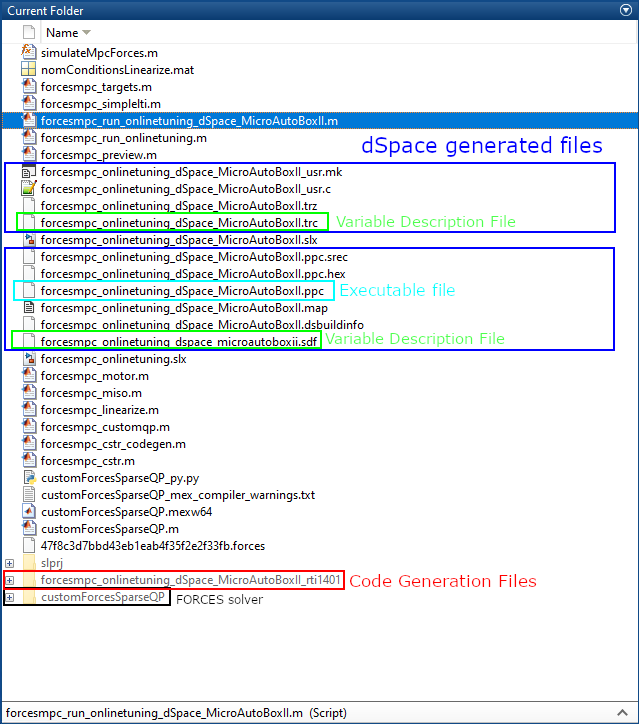
Figure 6.7 The generated files from the Simulink Code Generation¶
Open dSpace Control Desk and select create new project (see Figure 6.8).
Name the project and the experiment (see Figure 6.9 and Figure 6.10).
Select the platform to which you will deploy the generated executable (see Figure 6.11).
Import the variable description file
forcesmpc_onlinetuning_dSpace_MicroAutoBoxII.sdfin order to have access to the model variables and see the results of the execution (see Figure 6.12 and Figure 6.13).Click Finish to create the project (see Figure 6.14).
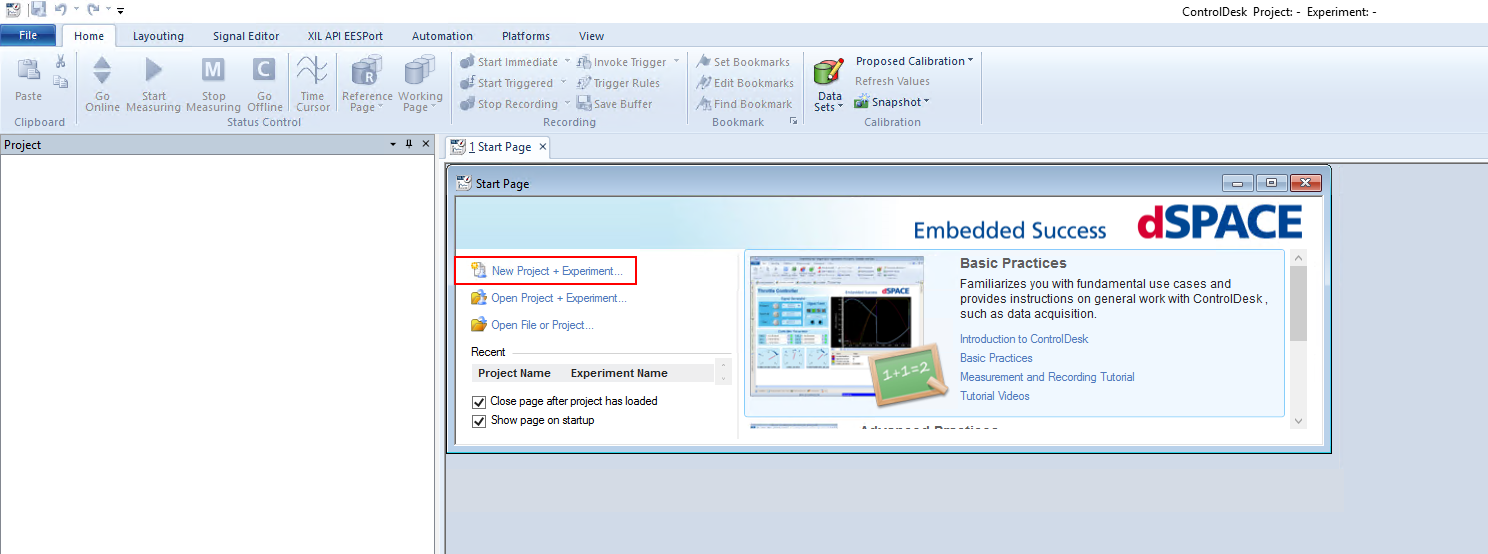
Figure 6.8 Start a new project¶
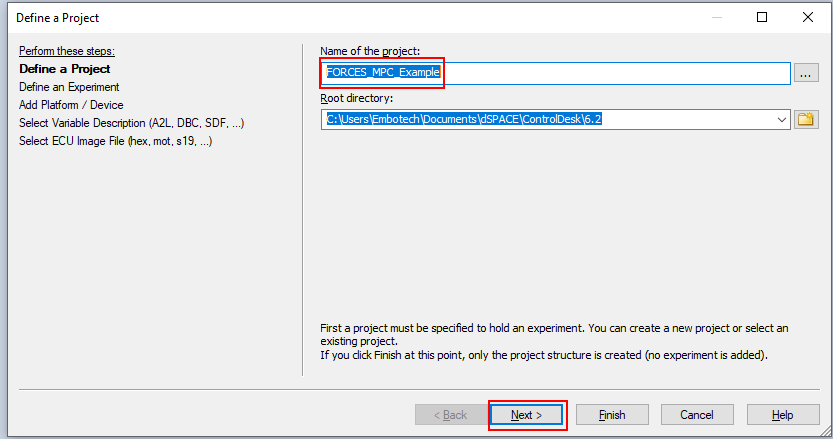
Figure 6.9 Name your project¶
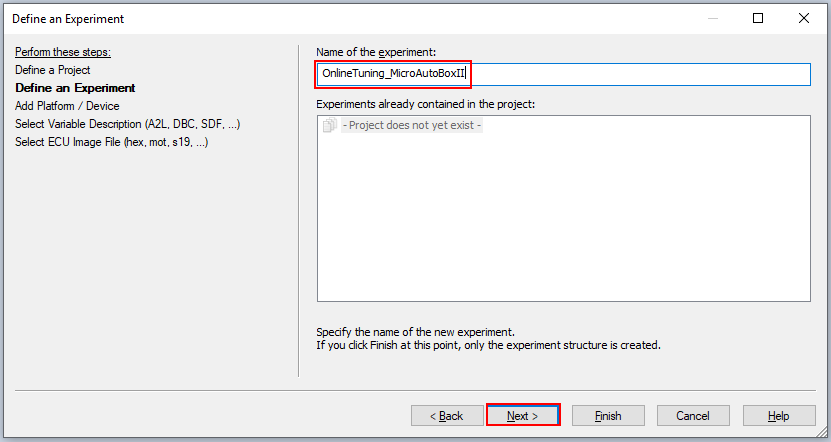
Figure 6.10 Name your experiment¶
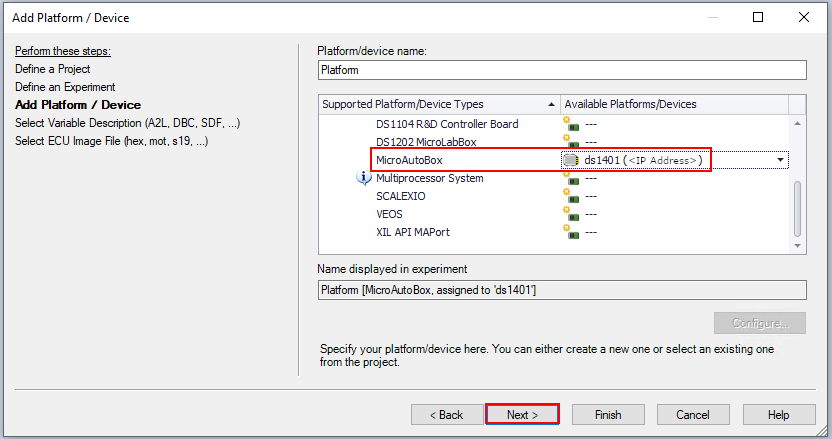
Figure 6.11 Select the MicroAutoBox platform¶
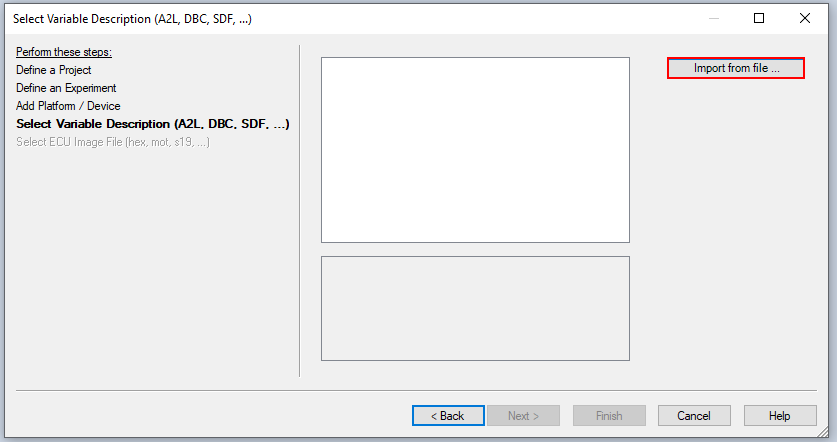
Figure 6.12 Import the variable description file¶
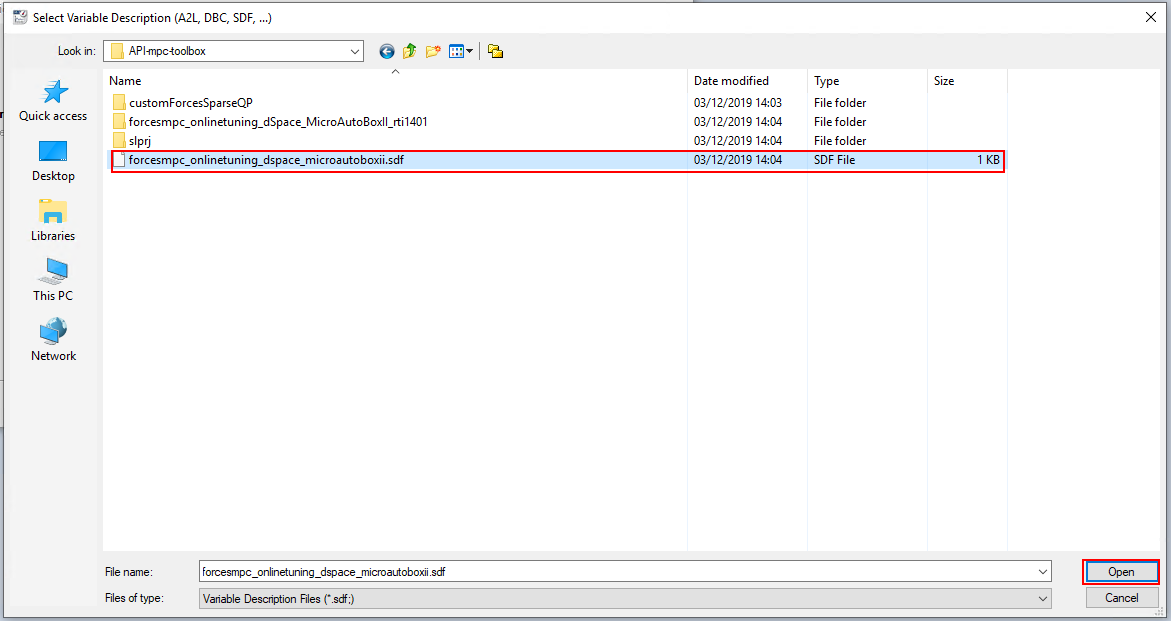
Figure 6.13 Select the sdf file with the variables description¶
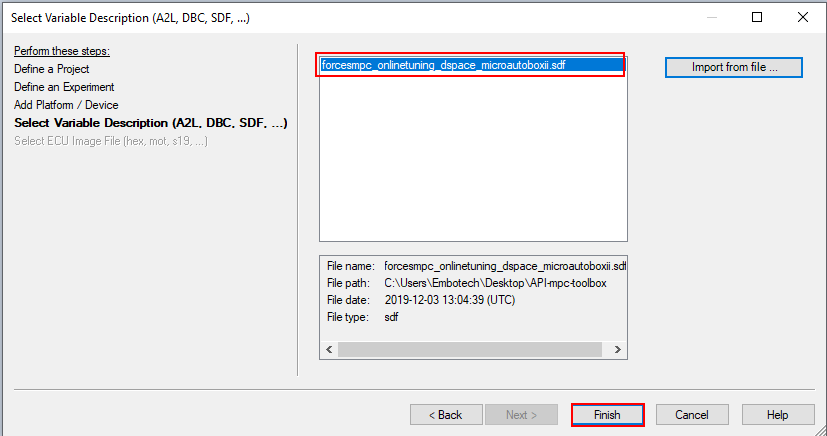
Figure 6.14 Click Finish to create the project¶
On the project layout select the tab
Variablesand on theforcesmpc_onlinetuning_dSpace_MicroAutoBoxIIcategory expandModel Root(see Figure 6.15).Select
FORCES MPC (Sparse QP)and Drag & Drop all the output variables together to the Layout. In the opened menu selectTime Plotter(see Figure 6.16).Drag & Drop the output variables again and now choose
Display(see Figure 6.17).To see all the plots concurrently right-click on the left of the Y-axis and select
YAxes-view>Horizontal stacked(see Figure 6.18).
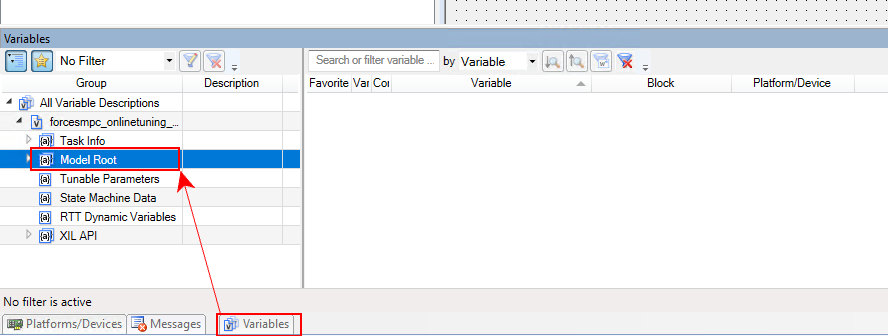
Figure 6.15 Find the model root in the variables tab¶
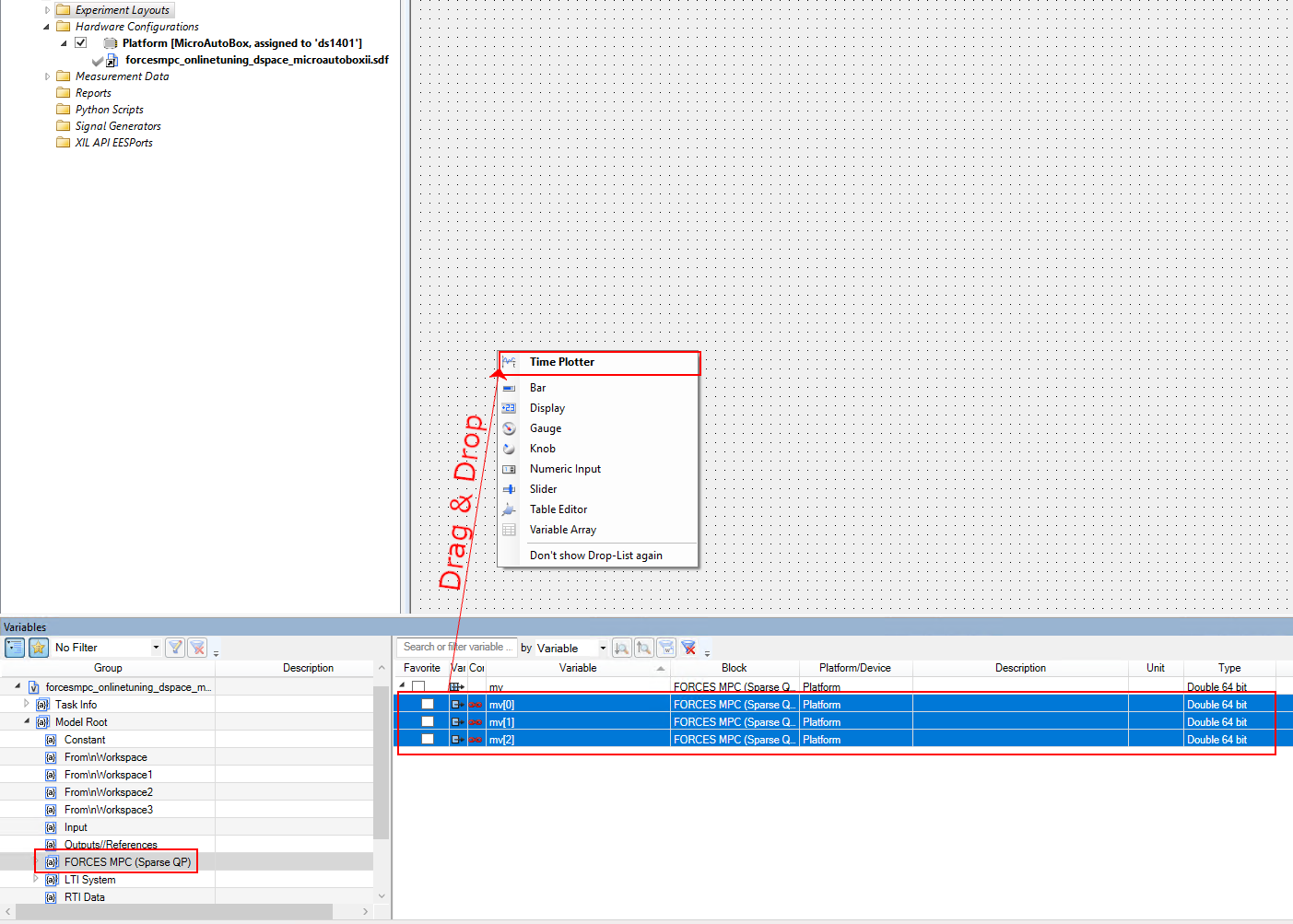
Figure 6.16 Add the variables as plots¶
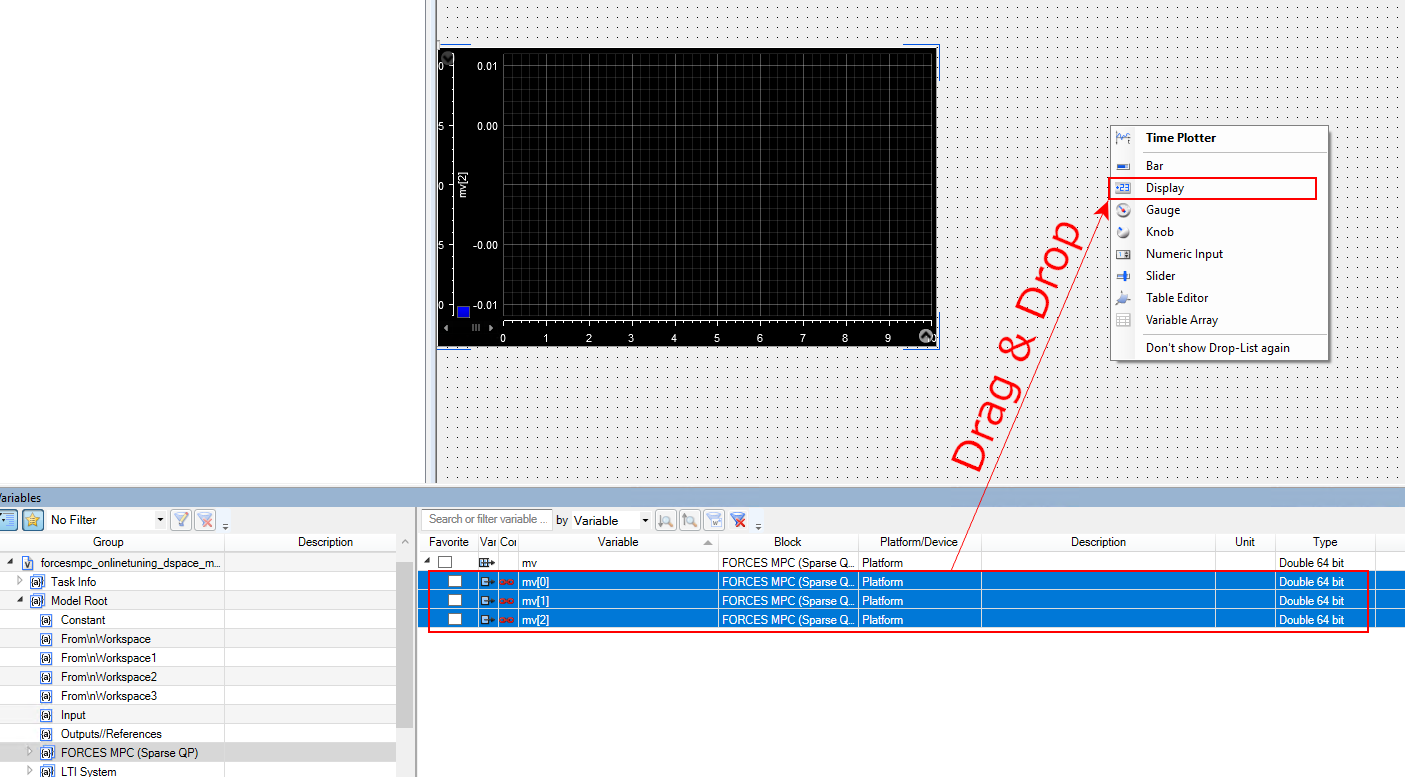
Figure 6.17 Add the variables as displays¶
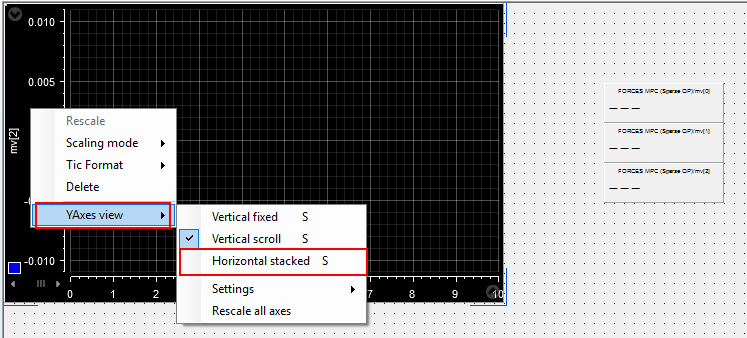
Figure 6.18 Select to show all the signals on the same plot with their own Y-axes¶
Select the
Platforms/Devicestab. Right-Click on your platform and selectReal-Time Application>Load. Choose the executable fileforcesmpc_onlinetuning_dSpace_MicroAutoBoxII.ppc(see Figure 6.19 and Figure 6.20).Select
Go OnlineandStart Measuringto see the results. (see Figure 6.21 and Figure 6.22).
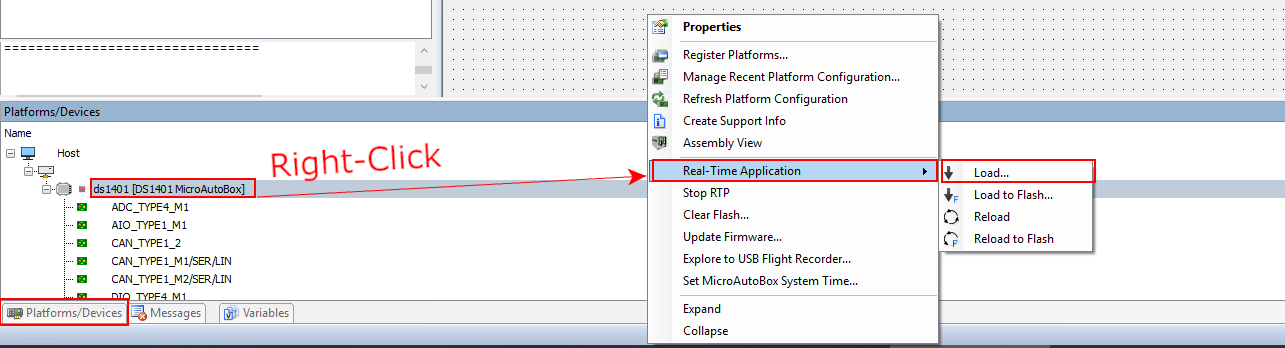
Figure 6.19 Load the application on the dSPACE MicroAutoBox II¶
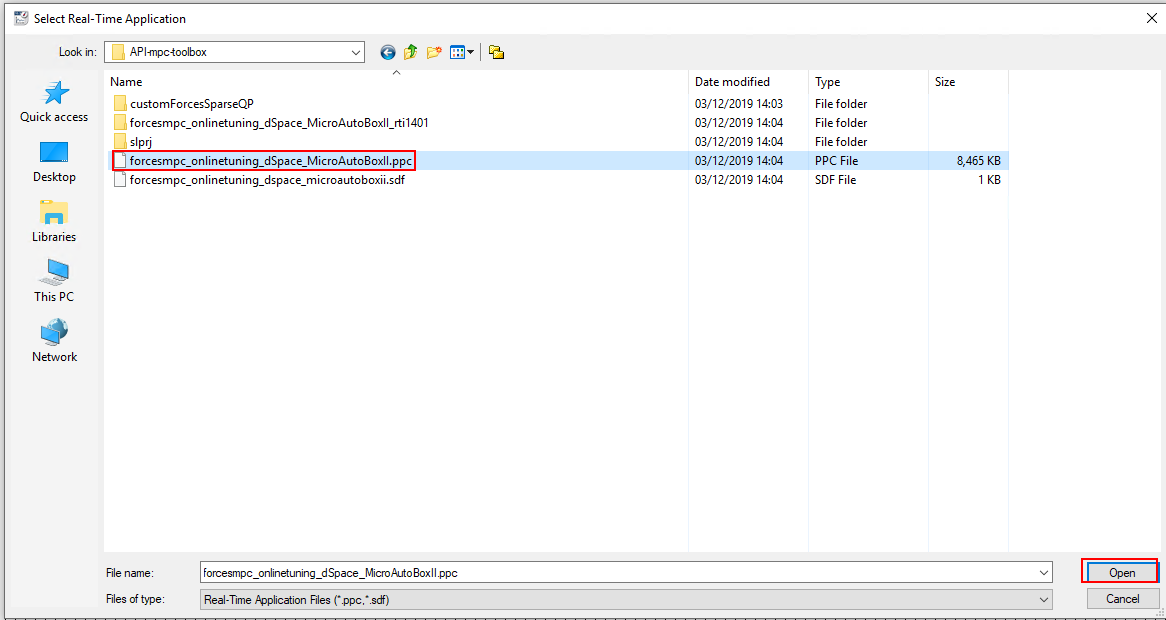
Figure 6.20 Select the executable to run the experiment¶

Figure 6.21 Buttons Go Online and Start Measuring to receive execution results¶
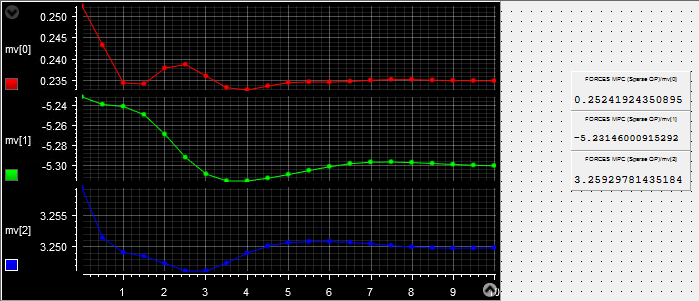
Figure 6.22 Plots and results from experiment on dSPACE MicroAutoBox II¶
6.6. Examples¶
The plugin comes with several examples to demonstrate its functionalities and flexibility.
The packaged examples are the following ones:
forcesmpc_cstr.mis a linear time-invariant (LTI) MPC example with unmeasured outputs. It also shows how to use the MATLAB Coder for generating and running mpcmoveForces as a mex interface, which results in lower simulation times.Code is available
here.forcesmpc_targets.mis an LTI MPC example with a reference on one manipulated variablesCode is available
here.forcesmpc_preview.mis an LTI MPC example with previewing on the output reference and the measured disturbanceCode is available
here.forcesmpc_motor.mis an LTI MPC example with state and input constraintsCode is available
here.forcesmpc_miso.mis an LTI MPC example with one measured output, one manipulated variable, one measured disturbance, and one unmeasured disturbanceCode is available
here.forcesmpc_simplelti.mdemonstrates a simple LTI MPC designedCode is available
here.forcesmpc_linearize.mis an example of linear MPC around an operating point of a nonlinear system.Code is available
here.forcesmpc_customqp.mshows how to use the FORCESPRO dense QP solver as a custom solver in an MPC objectCode is available
here.forcesmpc_run_onlinetuning.mdemonstrates how to run the MPC Simulink block.Code is available
here.forcesmpc_run_onlinetuning_dSpace_MicroAutoBoxII.mdemonstrates how to generate code for dSpace MicroAutoBox II using the MPC Simulink block.Code is available
here.
The forcesmpc_linearize.m example is described in more details below. First, the linearized model and the operating point are loaded from a MAT file.
%% Load plant model linearized at its nominal operating point (x0, u0, y0) load('nomConditionsLinearize.mat');
An MPC controller object is then created with a prediction horizon of length \(p = 20\), a control horizon \(m = 3\) and a sampling period \(T_s = 0.1\) seconds as explained here.
%% Design MPC Controller % Create an MPC controller object with a specified sample time |Ts|, % prediction horizon |p|, and control horizon |m|. Ts = 0.1; p = 20; m = 3; mpcobj = mpc(plant,Ts,p,m);
Nominal values need to be set in the MPC object.
% Set the nominal values in the controller. mpcobj.Model.Nominal = struct('X',x0,'U',u0,'Y',y0);
Constraints are set on the manipulated variables and an output reference signal is provided.
% Set the manipulated variable constraint. mpcobj.MV.Max = 0.2; % Specify the reference value for the output signal. r0 = 1.5*y0;
From the MPC object and a structure of options, a FORCESPRO solver can be generated.
% Create options structure for the FORCESPRO sparse QP solver options = mpcToForcesOptions(); % Generates the FORCESPRO QP solver [coredata, statedata, onlinedata] = mpcToForces(mpcobj, options);
Once a reference signal has been constructed, the simulation can be run using mpcmoveForces.
for t = 1:Tf % A measurement noise is simulated Y(:, t) = dPlant.C * (X(:, t) - x0) + dPlant.D * (U(:, t) - u0) + y0 + 0.01 * randn; % Prepare inputs of mpcmoveForces onlinedata.signals.ref = r(t:min(t+mpcobj.PredictionHorizon-1,Tf),:); onlinedata.signals.ym = Y(:, t); % Call FORCESPRO solver [mv, statedata, info] = mpcmoveForces(coredata, statedata, onlinedata); if info.ExitFlag < 0 warning('Internal problem in FORCESPRO solver'); end U(:, t) = mv; X(:, t+1) = dPlant.A * (X(:, t) - x0) + dPlant.B * (U(:, t) - u0) + x0; end
The resulting input and output signals are shown in Figure Figure 6.23 and Figure Figure 6.24 respectively.
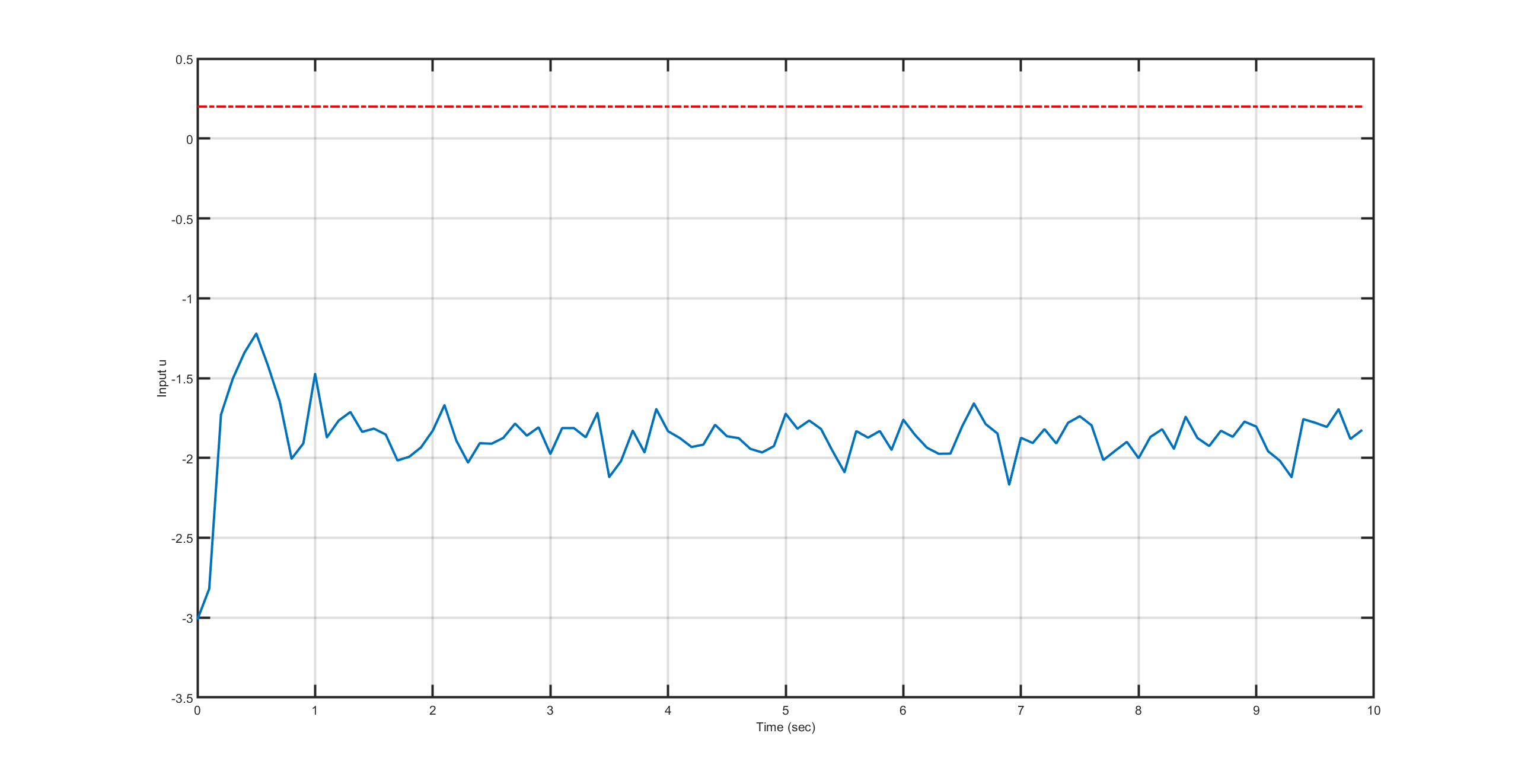
Figure 6.23 Manipulated variable computed by the FORCESPRO plugin.¶
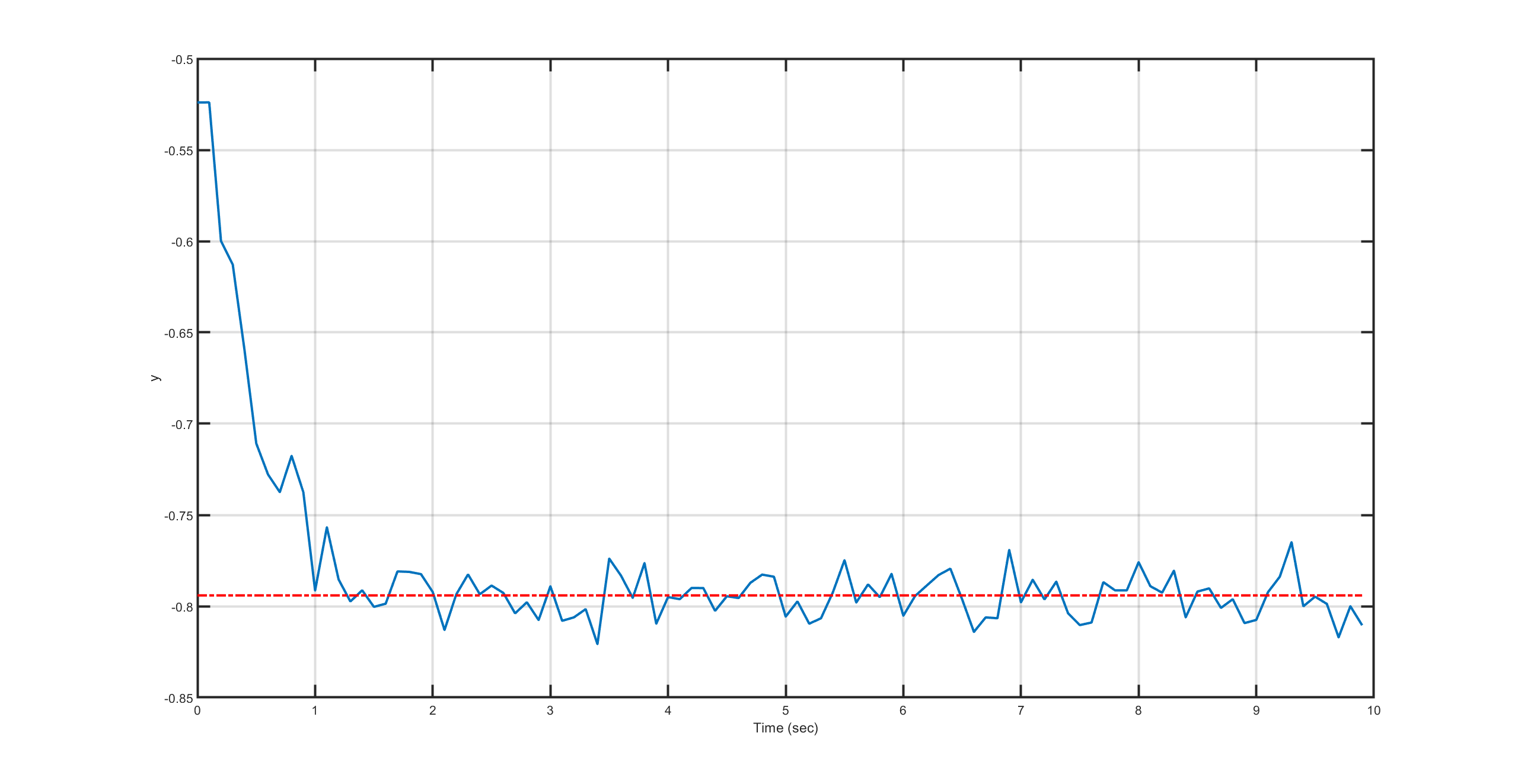
Figure 6.24 Output variable computed by the FORCESPRO plugin.¶